First ROYAL Group Meeting - CoLoRS Laboratory
We held our first meeting as the ROYAL group on October 27, 2023. We had the joy of coming together for the first time and had the opportunity to celebrate the 100th anniversary of our Republic early!
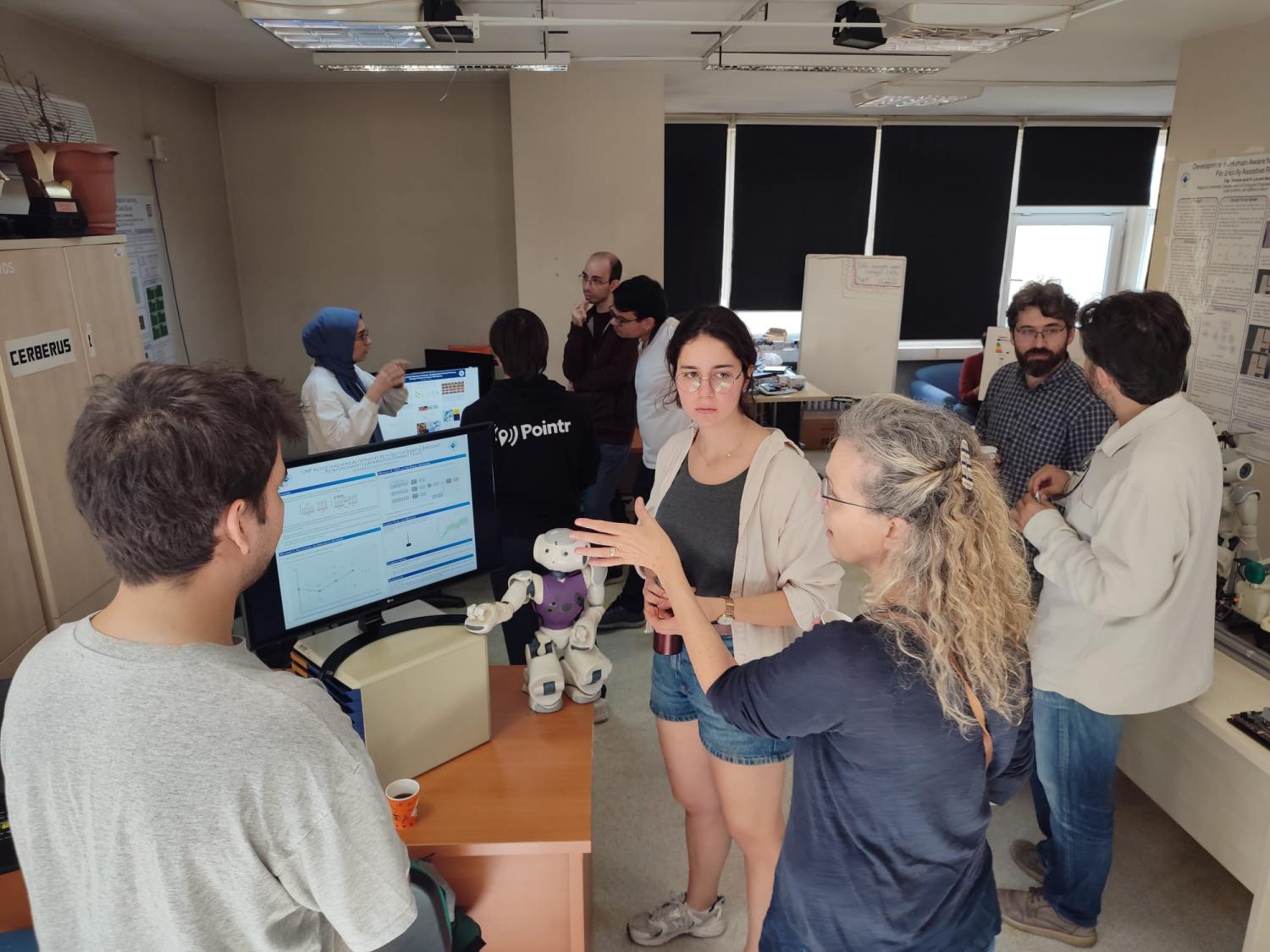
The meeting was held in Cognitive Learning and Robotics (CoLoRs) Lab at Computer Engineering Department. Under the supervision of Assoc. Prof. Emre Ugur, main research areas of CoLoRs Lab are learning from demonstration for manipulation, computational modelling of symbol emergence, affordance learning, social navigation for mobile robots.
The lab members presented their recent work in a poster session. PhD candidate Yiğit Yildirim presented his recent work on learning techniques for social robotics. His current study aims to increase the socialness of the navigation of mobile robots. He uses novel deep-learning techniques to teach robots the social norms humans follow. PhD candidate Alper Ahmetoglu shared his work titled "Symbolic Manipulation Planning with Discovered Object and Relational Predicates". This work focuses on learning symbolic representations from the robot’s interaction with the environment. Such a model allows for transforming the continuously represented state information into symbolic vectors that we can use for domain-independent planning with state-of-the-art AI planners. MSc student Tuba Girgin presented "Multi-Object Graph Affordance Network: Enabling Goal-Oriented Planning through Compound Object Affordances". She explores affordances of compound objects through interactions. The effects of the interactions are predicted by a graph network that encodes the compound objects. MSc student Muhammet Hatipoglu presented his recent work, "CNP Actor Imagining Alternative Actions for Sample Efficient Reinforcement Learning for Dynamic Tasks" on which he investigates ways of learning optimal policies with reduced number of environment interactions using state of the art conditional neural processes architecture. In addition, he aims to utilize world models for further sample efficiency. Bsc student Batuhan Celik presented "Developmental Scaffolding with Large Language Models". Inspired by the parental scaffolding process during infant development, this study investigates whether LLMs can be used as scaffolding parents for robotics applications to facilitate learning.