İlk ROYAL Grup toplantısı - CoLoRS Laboratuvarı
ROYAL grubu olarak ilk toplantımızı 27 Ekim 2023 günü gerçekleştirdik. Hem ilk kez bir araya gelmenin sevincini yaşadık, hem de Cumhuriyetimizin 100. Yılını erkenden kutlama fırsatını bulduk!
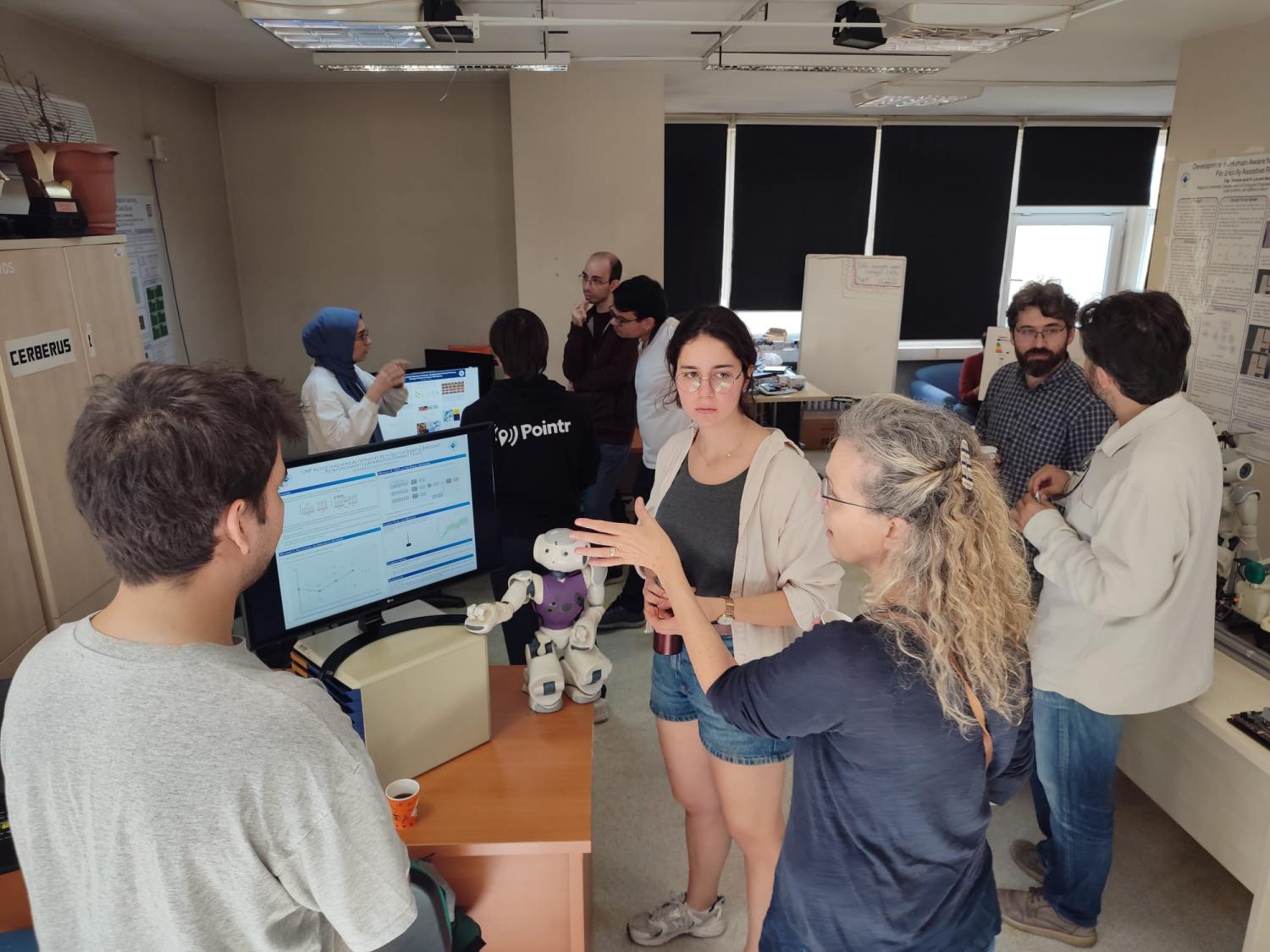
Toplantı Bilgisayar Mühendisliği Bölümü Bilişsel Öğrenme ve Robotik (CoLoRs) Laboratuvarında gerçekleştirildi. Doç. Emre Uğur, ColoRs Lab'ın ana araştırma alanları arasında manipülasyon için gösterim yoluyla öğrenme, sembol ortaya çıkışının hesaplamalı modellenmesi, uygunluk öğrenimi, mobil robotlar için sosyal navigasyon yer alıyor.
Laboratuvar üyeleri son çalışmalarını bir poster oturumunda sundular. Doktora adayı Yiğit Yıldırım, sosyal robotik için öğrenme teknikleri üzerine son çalışmasını sundu. Mevcut çalışması mobil robotların navigasyonunun sosyalliğini arttırmayı amaçlıyor. Robotlara insanların takip ettiği sosyal normları öğretmek için yeni derin öğrenme teknikleri kullanıyor. Doktora adayı Alper Ahmetoğlu, "Keşfedilen Nesne ve İlişkisel Yüklemlerle Sembolik Manipülasyon Planlaması (Symbolic Manipulation Planning with Discovered Object and Relational Predicates)" başlıklı çalışmasını paylaştı. Bu çalışma, robotun çevreyle etkileşiminden sembolik temsillerin öğrenilmesine odaklanmaktadır. Böyle bir model, sürekli olarak temsil edilen durum bilgisini, son teknolojiye sahip yapay zeka planlamacılarla alandan bağımsız planlama için kullanabileceğimiz sembolik vektörlere dönüştürmeye olanak tanır. Yüksek Lisans öğrencisi Tuba Girgin, "Çok Nesneli Grafik Uygunluk Ağı: Bileşik Nesne Sağlayıcılıkları Yoluyla Hedef Odaklı Planlamayı Etkinleştirme (Multi-Object Graph Affordance Network: Enabling Goal-Oriented Planning through Compound Object Affordances)" konusunu sundu. Etkileşimler yoluyla bileşik nesnelerin olanaklarını araştırıyor. Etkileşimlerin etkileri, bileşik nesneleri kodlayan bir grafik ağı tarafından tahmin edilir. Yüksek Lisans öğrencisi Muhammet Hatipoğlu, son teknoloji ürünü koşullu sinirsel süreçler mimarisini kullanarak azaltılmış çevre etkileşimi ile optimal politikaları öğrenmenin yollarını araştırdığı "Dinamik Görevler için Örnek Verimli Pekiştirmeli Öğrenme için Alternatif Eylemleri Hayal Eden CNP Aktörü (CNP Actor Imagining Alternative Actions for Sample Efficient Reinforcement Learning for Dynamic Tasks)" adlı son çalışmasını sundu. Ayrıca daha fazla örnekleme verimliliği için dünya modellerinden yararlanmayı hedefliyor. Lisans öğrencisi Batuhan Çelik "Geniş Dil Modelleriyle Gelişimsel İskeletlenme (Developmental Scaffolding with Large Language Models)" konusunu sundu. Bebek gelişimi sırasındaki ebeveyn iskele sürecinden esinlenen bu çalışma, öğrenmeyi kolaylaştırmak için yüksek lisans eğitimlerinin robotik uygulamalar için ebeveyn iskelesi olarak kullanılıp kullanılamayacağını araştırıyor.